Matrix Assembly
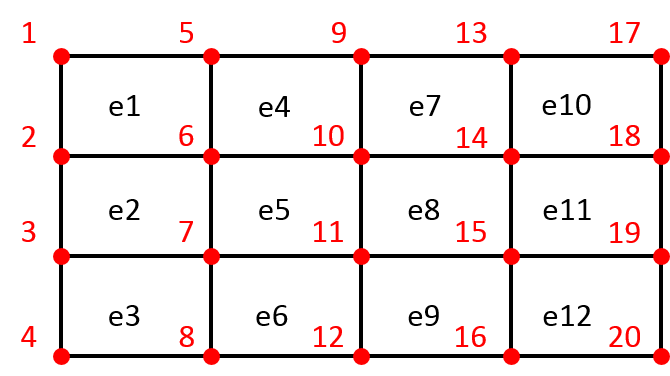
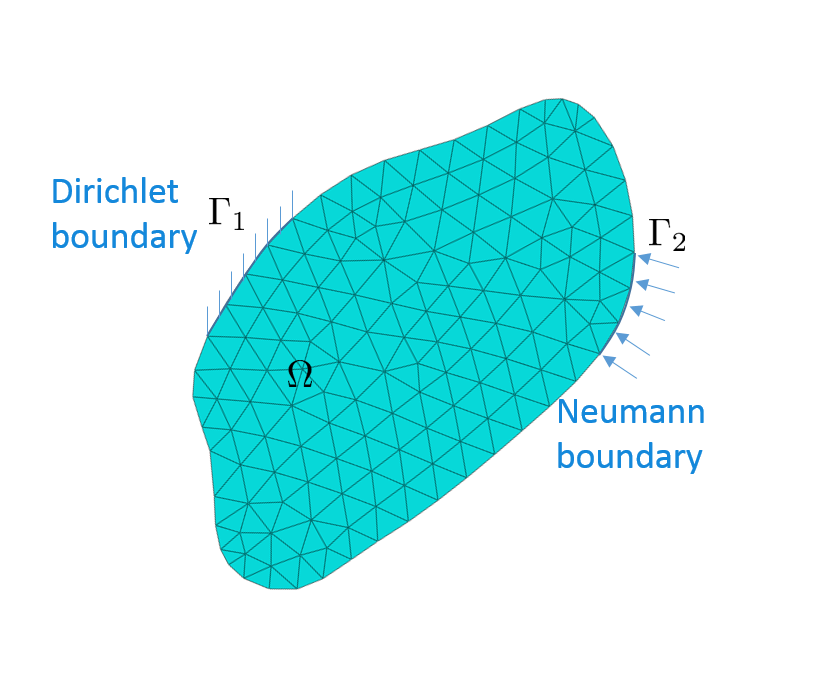
Let us consider an elastic deformable body $\Omega$. The discrete form of equilibrium equation should take the following form $\mathbf{K} \mathbf{u} = \mathbf{F}$, where $\mathbf{K}$ is the stiffness matrix, $\mathbf{F}$ is the vector of (external) load, and $\mathbf{u}$ is the vector of nodal displacements. For simplicity, we assume that $\Omega$ is a two dimensional rectangular … Read more